


Di seguito un altro estratto molto interessante della tesi di laurea di un nostro Ingegnere laureando.
Il ponte ad H è uno “strumento” decisamente utilizzato nell’elettronica con cui interagiamo quotidianamente.
La definizione di strumento deriva dal fatto che non è un oggetto fisico quanto in realtà una topologia da applicare per assolvere ad un determinato compito.
Vediamo cosa si intende per ponte ad H, in figura possiamo vedere un tipico ponte ad H ad nMOS.
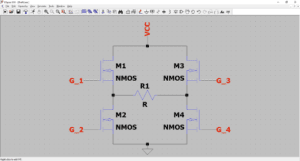
In questo momento non abbiamo inserito nè valori nè modelli di componenti poiché, in questa sede ci occuperemo solamente di indicarne il funzionamento.
Come possiamo vedere, il nome stesso è legato all’effettiva forma della rappresentazione grafica che ricorda appunto una H.
L’utilizzo di questo strumento è legato alla necessità di fare scorrere la corrente all’interno di un carico in entrambi i versi, permettendo quindi un’inversione di polarità. Prima abbiamo detto che possiamo trovarlo anche in apparecchi di uso comune, una banale macchinina radiocomandata, all’interno, presenterà una topologia a ponte ad H, che servirà a fare muovere il motore in entrambi i sensi di marcia. Come descritto sopra, la rappresentazione in figura, ne è un’implementazione ma possono esisterne di tipi differenti. Non è raro, per macchinine radiocomandate di bassa fascia, imbattersi in ponti ad H realizzati con BJT che implementano uno stadio Darlington per favorire una maggiore corrente di pilotaggio, questa scelta potrebbe semplificare il controllo e permetterebbe di scegliere componenti generalmente più economici, viste le scarse richieste di prestazioni.
È inoltre possibile imbattersi in ponti con configurazioni miste, (low side nMOS) e (high side pMOS) dove per Low side si intendono i due MOSFET nella parte bassa e, per high side quelli della parte alta. Questa configurazione è poco utilizzata poiché i pMOS sono meno performanti rispetto a quelli a canale n. questo problema è legato alla mobilità delle lacune rispetto alla mobilità degli elettroni che risulta circa 3 volte inferiore. Tuttavia, la scelta di MOSFET a canale n per implementare l’high side, crea un problema nel garantirne il corretto pilotaggio.
MOSFET:
I Mosfet sono dispositivi che presentano tre regioni di funzionamento:
- Interdizione;
- Triodo;
- Saturazione;
Usando una simulazione LT spice possiamo vedere la caratteristica di un MOSFET a canale n.
Per tensioni di comando inferiori a 4.5V questo componente è da intendersi come inattivo e quindi in interdizione. La zona di triodo è la prima parte in cui la retta ha una pendenza ben definita e a fronte di un piccolo aumento di tensione si ha un grande aumento di corrente. In questa zona il MOSFET opera come un resistore di valore RDS_ON che in genere è molto basso, se forzato a lavorare in queste condizioni, il MOSFET opera come “interruttore”. La zona di saturazione, invece è quella in cui la caratteristica comincia ad appiattirsi. Nei ponti ad H è necessario che l’elemento commutatore operi in modo quanto più possibile simile ad un interruttore ideale. Nel nostro caso, quindi, vogliamo operare in regione di triodo con un’elevata tensione del comando.
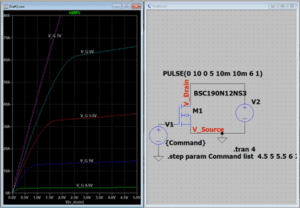
Come è possibile vedere dal grafico, la caratteristica migliore su cui vorremmo muoverci per questo tipo di applicazione è quella rappresentata in fucsia, essa necessita di una tensione tra i terminali di Gate e Source di almeno 7V.
Se per i low-side, questo fattore in genere non rappresenta un problema, lo è invece per gli high side poiché, diversamente dai precedenti essi hanno una tensione di source che in generale sarà molto prossima a quella di alimentazione. In questo caso, il componente che si occuperà di fornire il comando al terminale di Gate dovrà superare di 7V la tensione di alimentazione del ponte H stesso.
Per questa ragione, i ponti ad H vengono generalmente pilotati da componenti dedicati che l loro interno implementano pompe di carica. Queste pompe di carica, sono circuiti che permettono di fornire una tensione superiore a quella di alimentazione così da permettere il pilotaggio corretto dei MOSFET a canale n dell’high side.
POTENZE:
Una questione spesso sottovalutata è il calcolo della potenza dissipata. I MOSFET hanno una capacità termica che è riportata nel Datasheet che ne è la scheda tecnica, inoltre riportano diversi coefficienti di resistenza termica espressa in [°C/W]. Questo coefficiente ne determina l’innalzamento di temperatura a fronte di una precisa potenza da dissipare.
Errore comune durante il dimensionamento di queste topologie è trascurare la potenza di commutazione.
Le potenze in gioco sono:
- Potenza di conduzione;
- Potenza di commutazione;
quest’ultima è generalmente trascurabile rispetto al calcolo complessivo, viene quindi trascurata in favore di un design più robusto. Ove possibile è consigliabile aumentare di un 10-20% la zona di tolleranza, ad esempio, se sarà necessario dissipare 10W sarà consigliabile dimensionare il sistema per sopportarne 12.
Potenza di conduzione:
Questa potenza è quella dissipata dal dispositivo quando risulta acceso in regione di triodo ed è determinata da RDS_ON * IDS2 .
Facendo un esempio, consideriamo un MOSFET con RDS_ON = 50 mΩ ed una corrente di pilotaggio IDS = 5 A. La potenza di conduzione dissipata dal MOSFET sarà PD= 1.25 W.
Anche se la potenza in gioco risulta essere esigua molti dispositivi presentano una resistenza termica intorno ai 40 – 50 °C/W. In questo caso @ θJA = 50 °C/W avremmo un ∆T = +62.5 °C. Considerando di lavorare a temperatura ambiente di 25°C il nostro dispositivo (in aria ferma e senza dissipatore termico) salirà ad una temperatura di 87.5 °C.
Per semplicità di astrazione pensiamo sempre ad un caso d’uso del ponte ad H ed in particolare alla macchina radiocomandata, considerando di andare sempre alla massima velocità i MOSFET del nostro ponte ad H saranno sempre accesi in regione di triodo secondo la diagonale che ne determina il senso di marcia, per questa ragione sarà necessario considerare la sola potenza di conduzione poiché non vi sarà potenza di commutazione. Diversamente, volendone regolare la velocità potremmo decidere di tenere accesi i MOSFET della diagonale solamente per una porzione di tempo all’interno di una finestra definita. Questo tipo di controllo è detto PWM (Pulse Width Modulation) – Modulazione a larghezza d’impulso. Essa funziona tenendo acceso il dispositivo per una porzione percentuale DC (duty Cycle) di un tempo predefinito che sarà naturalmente l’inverso della frequenza di pilotaggio. In questa condizione è necessario considerare anche la potenza di commutazione.
Potenza di commutazione:
La potenza di commutazione è quella porzione necessaria a portare il dispositivo nella regione di triodo.
Per permettere questa transizione è necessario un tempo che è strettamente dipendente dalla corrente di carica/scarica fornita al dispositivo stesso. Le schede tecniche dei componenti presentano sempre un grafico che indica la carica di Gate QGATE, per fare un esempio prendiamo il grafico del dispositivo analizzato in precedenza:
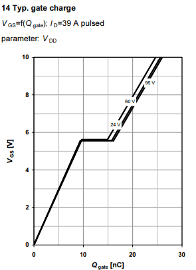
Per determinare la potenza dissipata bisogna considerare la carica necessaria, il Plateau di Miller è rappresentato dalla regione orizzontale intorno ai 5.5 V; essa è fisicamente la zona in cui viene caricata la capacità parassita tra i terminali di Gate e Drain, ad essa va inoltre aggiunta la carica relativa alla capacità di Gate e Source della rampa iniziale, trascurandone però la parte inferiore ai 4 V, tensione sotto alla quale il MOSFET è da considerarsi “Spento”. Facendo un rapido conto possiamo dire che tra i 10 e i 15 nC ci troviamo in regione di Miller mente ra i 7,5 e 10 nC abbiamo la porzione di transizione tra interdizione e saturazione. La carica totale sarà quindi ((15 – 10) + (10 – 7,5)) = 7.5 nC.
Supponiamo di pilotare questo dispositivo con una corrente di circa 100 mA in questo caso avremmo una potenza di commutazione che sarà:
PCOMM = VALIM * IDS * FSW (7.5 nC / 100mA) = 3.75µWs * FSW.
Per questo calcolo si è supposta una tensione di alimentazione del ponte H pario a 10V ed un carico che assorbisse 5 A, per completare questo calcolo è necessario decidere una frequenza di commutazione.
Generalmente viene scelta una frequenza per la quale il tempo di commutazione risulta essere trascurabile, occorre quindi valutare il tempo di commutazione. Per valutare il tempo di commutazione è necessario considerare unicamente il tempo nel plateau di Miller, quindi la carica interessata sarà unicamente di 5nC -> t = 5nC/100mA = 50ns. Con questa premessa è consigliabile mantenere una frequenza di pilotaggio inferiore ai 100kHz. Per scrupolo si può scegliere una frequenza di 40 kHz che risulta fuori dalla banda dell’udibile. Con frequenze contenute nella banda udibile, qualora il motore risultasse bloccato, produrrebbe un “ronzio” alla frequenza di pilotaggio stessa.
Tornando al calcolo della potenza di commutazione possiamo quindi ricavare il valore finale pari a:
PCOMM = 3.75 µWs * 40 k/s = 0.15W.
In questo caso possiamo considerare la potenza di commutazione trascurabile rispetto a quella di conduzione.
La potenza totale da dissipare sarà comunque la somma dei due contributi, salvo un pilotaggio costante come già descritto in precedenza.


